|
|
|
Hi, I'm Rafay, PhD candidate at the Robotics Perception and Learning Lab , affiliated with University of Bonn and Lamarr Institute . My research focuses on Spatial/Physical AI, Robotics and Open-World Learning. Before this, I have worked across academia and industry in diverse research and engineering roles, contributing to a range of projects related to robotics, 3D vision, and simulation. I completed my M.Sc. from Technical University of Munich (TUM) , where I conducted my master’s thesis research in collaboration with the Huawei Munich Research Center, exploring efficient and scalable methods for open-world 3D scene understanding using foundation models and LLMs.
Feel free to Email if you want to discuss research, startups, AI (Robotics / CV / LLMs), or want to collaborate. |

|
|
|
|
12.2025 - Present | Bonn, Germany
PhD Candidate and Researcher Assistant @ Uni-Bonn & Lamarr Institute. |
|
|
09.2025 - 12.2025 | Stuttgart, Germany Robotics Engineer @ Sereact. |
|
|
03.2025 - 06.2025 | Munich, Germany Entrepreneur in Residence @ ANTLER Spring 2025 Cohort. |
|
|
04.2023 - 05.2024 | Munich, Germany Robotics Research (Internship + MSc Thesis) @ Huawei Munich Research Center. |
|
|
07.2022 - 04.2023 | Munich, Germany Student Research Assistant (HiWi) @ Chair of Computational Modeling & Simulation. |
|
|
07.2020 - 10.2021 | Karachi, Pakistan Research Engineer @ National University of Sciences and Technology (PNEC-NUST). |
|
|
07.2019 - 01.2020 | Karachi, Pakistan Student Research Assistant @ NED University of Engineering & Technology. |
Education
|
|
12.2025 - Present | Bonn, Germany CS PhD Candidate @ Robotics Perception & Learning Lab. |
|
|
10.2021 - 08.2024 | Munich, Germany Thesis: Open World 3D Scene Understanding using Foundation Models. (IEEE, ICRA 2025) |
|
|
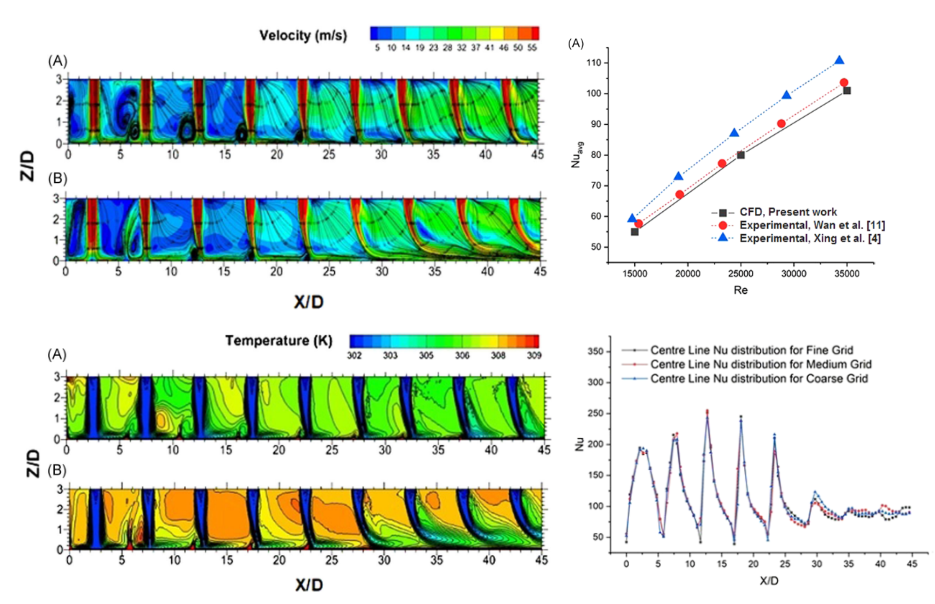
12.2015 - 08.2019 | Karachi, Pakistan Thesis: Numerical Investigation of Heat Transfer Enhancement in Impinging Jets. (Wiley, Heat Transfer) |
|
OpenSU3D: Open Word 3D Scene Understanding using Foundation ModelsRafay Mohiuddin,Sai Manoj Prakhya, Fiona Collins, Ziyuan Liu, Andre Borrmann IEEE - International Conference on Robotics and Automation (ICRA'2025) paper / web / |
|
Optical Process Control for extrusion-based Additive Manufacturing methods in constructionRafay Mohiuddin, Miranda Cruz Policroniades, Martin Slepicka, André Borrmann ISARC - International Symposium on Automation and Robotics in Construction (ISARC'2023) paper / web / |
|
Nanoscale heat transfer investigation of an array of impinging jet systems with different working fluids under crossflow with and without pin finsUsman Allauddin, Rafay Mohiuddin, Hafiz M. Usman Khan, Naseem Uddin, Waqar A. Khan Wiley - Heat Transfer, 2020 (Q1 Journal, 26% acceptance rate) paper / web / |
|
Rafay Mohiuddin |
|
Design and source code from Jon Barron's website |